

Cette chronique est dans la droite ligne et se nourrit des recherches et rencontres publiées sur mon site Les cahiers de l’imaginaire.
La curiosité est un des principaux traits distinctifs de l’espèce humaine. Nous ne sommes évidemment pas les seuls parmi le monde du vivant à faire preuve de curiosité. Pour nous, toutefois, le fait d’être curieux dicte un très grand nombre de tâches quotidiennes et nous entraîne souvent dans de longues et périlleuses aventures.
La curiosité est un indicateur fiable lorsqu’il s’agit d’évaluer si un individu est créatif et inventif dans son champ d’expertise. La curiosité est aussi étroitement liée au plaisir et à la réalisation de soi. La curiosité alimente la motivation intrinsèque qui, à son tour, est un incitatif essentiel pour mener à terme tout projet d’apprentissage ou d’innovation.
La curiosité peut se définir comme étant le désir d’explorer tout ce qui est nouveau. Étymologiquement, le terme couvre un large éventail de motivations, allant du désir de connaître, à la passion des choses rares, jusqu’au goût d’apprendre des choses obscures sans nécessité.
Pourtant, la curiosité n’est pas reconnue à sa juste valeur lorsqu’il s’agit d’évaluer les candidats universitaires. Aux États-Unis, par exemple, seulement trois états considèrent la curiosité comme un marqueur capable d’identifier les élèves talentueux ou surdoués. Alors que 45 états reconnaissent comme paramètres déterminants le quotient intellectuel, et 39 états les résultats des tests normalisés.
Étonnamment, nous vivons à une époque où nous déployons des efforts considérables pour insuffler de l’intelligence et de la créativité aux machines (tout en craignant d’être dépassés un jour par celles-ci), alors même que nous coupons les budgets consacrés à l’éducation et à l’amélioration de nos propres facultés.
Pourquoi ne pas faire une pirouette et nous demander ce que les recherches en intelligence pourraient nous apprendre sur la curiosité ?
Inspirons-nous de deux projets. Le premier à Singapour : le développement d’un compagnon virtuel d’apprentissage. Le second au Canada : le développement d’une sculpture luminescente qui manifeste sa curiosité en interagissant avec les spectateurs.
Un compagnon virtuel d’apprentissage
Un compagnon virtuel d’apprentissage, pour qu’il soit crédible, doit être capable d’émotions. Il doit, entre autres, pouvoir faire preuve de curiosité. Mais comment modéliser cette curiosité pour l’intégrer dans les systèmes virtuels d’accompagnement ?
Étant donné que la machine ignore tout ou presque, il faut pouvoir lui expliquer. Les chercheurs singapouriens se sont basés sur trois variables essentielles : la nouveauté, la surprise et l’incertitude.
Ils ont développé un jeu pour l’apprentissage du système de transport d’eau et de nutriments dans les plantes. Le joueur doit recueillir les données requises (eau, nutriments) et déterminer comment les acheminer dans les racines d’un bananier qui est sur le point de dépérir.
Un premier agent indique au joueur les prochaines étapes ou les nouvelles informations disponibles au fur et à mesure que le jeu se déploie.
Un second agent, plus spécialisé, stimule la curiosité du joueur en procédant comme suit. (A) il recherche, à chaque étape, des stimuli provoquant la curiosité ; (B) il met en place un processus suggérant au joueur une série d’actions appropriées.
Lorsqu’une étape est franchie et qu’une donnée d’apprentissage est apprise par le joueur, l’agent met à jour son planning de stimulations et procède à l’étape suivante.
Dans un monde virtuel, les concepts qui font l’objet d’un apprentissage sont représentés sous forme d’objets. L’état de ces objets se modifie selon les actions entreprises par le joueur. L’objectif qui consiste à alimenter en eau la racine d’une plante se traduit par l’exécution d’une série d’actions : recueillir les molécules d’eau ; repérer les membranes perméables ; déterminer le bon ratio d’hydratation ; déclencher finalement le mécanisme d’osmose permettant l’absorption d’eau par la plante.
Le joueur formule son plan d’action de manière itérative avec l’appui du compagnon virtuel qui après chaque intervention du joueur cherche un stimulus pour provoquer sa curiosité : l’agent peut par exemple simuler la surprise suite à une série d’actions infructueuses de la part du joueur ; il peut amorcer un dialogue en révélant au joueur ce que pourrait être la prochaine étape pour réaliser l’objectif visé. Lorsqu’une étape d’apprentissage est franchie, l’agent suggère au joueur une étape subséquente, plus complexe et plus détaillée.
Le recours à un compagnon virtuel a permis d’améliorer l’apprentissage de manière significative. S’il fallait s’inspirer des résultats de cette recherche, nous dirions que dans notre vie quotidienne, pour être plus créatives et créatifs, il serait utile de nous rappeler qu’être plus curieux signifie à la fois rechercher la nouveauté, accueillir positivement la surprise et accepter un certain degré d’incertitude : trois attitudes qui, somme toute, sont bien adaptées à la situation de crise que traversent les sociétés actuelles. Trois attitudes à retenir pour ne pas être, un jour, dépassés par les machines.
Une sculpture robotique interactive
Une équipe de chercheurs canadiens en collaboration avec un artiste sculpteur, Philip Beesley, ont mis au point une sculpture robotique interactive capable de curiosité.
Le projet était chapeauté par un objectif plus large : comment équiper un robot de l’habileté cognitive nécessaire pour qu’il puisse apprendre de lui-même, et ce, tout au long de sa durée de vie utile. Il ne s’agit pas, précisons-le, d’une capacité généralisée d’apprentissage, mais d’une capacité circonscrite aux tâches spécifiques qui lui sont assignées.
Le système incorpore deux mécanismes d’apprentissage :
Un apprentissage machine classique : selon l’environnement dans lequel le robot évolue – c’est-à-dire en fonction des données fournies par les capteurs, et des actions exécutées par l’entremise de ses activateurs – des algorithmes comparent les actions accomplies aux prédictions du modèle et modifie celui-ci en conséquence.
Un méta-apprentissage machine : une autre série d’algorithmes surveille l’apprentissage machine classique en calculant ses erreurs. En comparant l’erreur prévue avec l’erreur réelle, et en réduisant à chaque fois l’écart, elle améliore l’apprentissage classique.
Cette superposition d’algorithmes prend en charge l’apprentissage et en améliore l’efficacité. Les chercheurs ont d’ailleurs remarqué une similitude entre le comportement de ces robots et celui des enfants en bas âge en train de jouer et d’apprendre de leurs erreurs.
Les adultes s’y retrouvent aussi, car ce modèle d’apprentissage est similaire au « learning by doing » : c’est en faisant qu’on apprend. Selon cette approche, l’apprenant s’améliore en procédant à de très nombreux essais et erreurs. Après chaque création, il modifie son action afin d’obtenir le meilleur résultat possible.
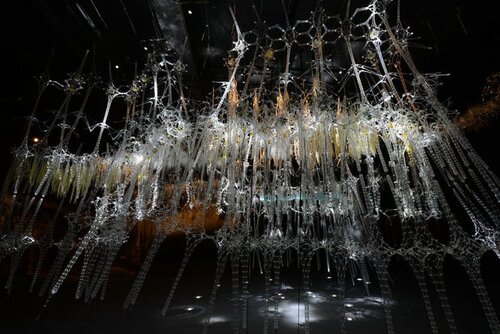
En ce qui concerne Philip Beesley, il a mis à profit cette technologie robotique pour créer d’impressionnantes sculptures interactives. Il s’agit de treillis suspendus, des canopées constituées de capteurs et d’activateurs qui réagissent à la présence humaine et dont le comportement est dicté par des algorithmes d’apprentissage basés sur la curiosité.
Le concept originel, la superposition d’un apprentissage machine classique et d’un méta-apprentissage machine, est d’abord mis en œuvre dans différentes régions spécifiques de la sculpture.
Le processus, dans l’ensemble de la sculpture, se déploie par l’entremise des trois éléments :
Les noeuds : chaque noeud, qui correspond à un mode différent d’interactions avec le spectateur, comprend un ensemble spécifique de variables qui sont transmises aux capteurs et aux activateurs.
Les sélecteurs d’actions : un sélecteur choisit une action soit (1) en fonction de sa faisabilité éprouvée ou (2) au hasard, afin d’explorer de nouvelles possibilités. Si la valeur attribuée à la faisabilité est faible, le système sera enclin à s’orienter vers de nouvelles actions aléatoires.
Les Experts : un expert est un modèle prédictif. Le modèle prédit ce que sera l’état du système en fonction de l’action sélectionnée. Sa capacité prédictive se fonde sur les observations passées (les données recueillies par les capteurs et les activateurs à chaque interaction). Au départ, il n’existe qu’un seul modèle pour une seule région. Mais au fur et à mesure que les interactions se multiplient, si les prédictions du modèle s’avèrent erronées, alors la région se subdivise en deux, et ainsi de suite.
Il en résulte d’étonnantes sculptures qui interagissent de manière inattendue avec les spectateurs. Dans un premier temps, lorsqu’un spectateur pénètre à l’intérieur de la canopée, la sculpture se fige. Elle paraît être surprise par l’intrusion d’un corps étranger dans son environnement. Puis, peu à peu, la curiosité l’emporte et elle commence à réagir aux gestes du spectateur.
Être imaginatif n’est pas uniquement quelque chose d’inné. C’est d’abord le résultat d’un processus de développement dans lequel plusieurs facteurs se croisent : les habiletés cognitives, la curiosité, la motivation, ainsi qu’un environnement propice.
Chers lecteurs, je suis curieuse de vous lire. Que vous inspirent ces expériences ? Que pourrions-nous faire pour encourager davantage la curiosité à l’école, dans les entreprises, dans la ville ?
![]()
Répondre à cet article
Suivre les commentaires : |
|
